Como cargar programas de Atmel Studio 7 a Arduino UNO y ejemplo en ensamblador
Este instructivo es útil cuando necesitamos pdesarrollar porgramas que utilizan caracteristicas mas avanzadas y poder programarlo en lenguaje ensamblador.
Se integra las capacidades de programacion mediante USB de nuestra tarjeta. Para hacer eso utilizaremos "avrdude.exe" y la opción "external tools" de Atmel Studio
Primero debemos instalar
Paso 1: Configurando Atmel Studio
Ahora conecta tu Arduino UNO a tu PC y espera a que se instalen los controladores.Cuando termine, toma nota de cual puerto está utilizando. Para mi caso es el COM4.
Ahora:
- Una vez abierto Atmel Studio de click en el menú "toos/external tools" y se abrirá un cuadro de dialogo donde se nos pedirá llenar algunos parámetros.
- En title escribir "Send to Arduino UNO" o el nombre que quieras.
- En command escribir "C:\Program Files (x86)\Arduino\hardware\tools\avr\bin\avrdude.exe"
- En arguments escribir " -C "C:\Program Files (x86)\Arduino\hardware\tools\avr\etc\avrdude.conf" -p atmega328p -c arduino -P COM5 -b 115200 -U flash:w:"$(ProjectDir)Debug\$(TargetName).hex":i " En este caso necesitas reemplazar el puerto COM por el que estes empleando.
Programación en lenguaje ensamblador
Lenguaje
ensamblador
Lenguaje
ensamblador
El lenguaje ensamblador, o assembler (en inglés assembly language y la abreviación asm), es un lenguaje de programación de bajo nivel. Consiste en un conjunto de mnemónicos que representan instrucciones básicas para los computadores, microprocesadores, microcontroladores y otros circuitos integrados programables. Implementa una representación simbólica de los códigos de máquina binarios y otras constantes necesarias para programar una arquitectura de procesador y constituye la representación más directa del código máquina específico para cada arquitectura legible por un programador. Cada arquitectura de procesador tiene su propio lenguaje ensamblador que usualmente es definida por el fabricante de hardware, y está basada en los mnemónicos que simbolizan los pasos de procesamiento (las instrucciones), los registros del procesador, las posiciones de memoria y otras características del lenguaje. Un lenguaje ensamblador es por lo tanto específico de cierta arquitectura de computador física (o virtual). Esto está en contraste con la mayoría de los lenguajes de programación de alto nivel, que idealmente son portátiles.
.DEVICE
La directiva device permite al usuario decir al Ensamblador que dispositivo y sobre que código se va a ejecutar.
Syntax:
.
DEVICE atmega328p
.ORG
La directiva org es usada para indicar el comienzo de la dirección, puede ser empleada tanto para código como para dato.
Syntax:
.ORG exprasión
Ejemplo
.ORG 0x00
.INCLUDE
La directiva include le dice al lenguaje ensambladro AVR que agregue el contenido de un archivo a nuestro programa.
Ejemplo
include "m328pdef.inc"
.EQU
Ésta es utilizada para dar un valor constante a una dirección fija.
Syntax:
.EQU etiqueta = exprasión
El valor de la expresión puede ser en hexadecimal, ejemplo:
.EQU DATO1 = 0x39 ;numero en hexadecimal
El valor de la expresión puede ser en binario, ejemplo:
.EQU DATO2 = 0b00110101 ;Binario (35 en hexadecimal)
El valor de la expresión puede ser en decimal, ejemplo:
.EQU DATO3 = 39 ;numero decimal (27 en hexadecimal)
El valor de la expresión puede ser en caracter, ejemplo:
.EQU DATO4 = '2' ;caracter ASCII
Puertos de entrada salida (configuraciones)

Ejemplos de código en ensamblador
Cambiar de estado una salida cada 500 milisegudos (la librería de los delay viene mas abajo)
;
blink_led.asm
;
;
Created: 15/02/2017 08:56:19 a. m.
;
Author : NoeAdrian
;
.include "m328pdef.inc"
.include "delay.inc"
.device atmega328p
;---------Configuración de puertos ---------------
.ORG 0x00 ;Comienzo
del codigo en la posición 0
;inicializa el SP
LDI R16, HIGH(RAMEND) ; Carga el SPH
OUT SPH, R16
LDI R16,
LOW(RAMEND) ;Carga
el SPL
OUT SPL,
R16
LDI R16,
0xFF ;R16
= 255 o 0b11111111
OUT DDRB,R16 ;Pone como salida el Puerto B
NOP ;Espera un ciclo de reloj
LDI R16, 0b00100000 ;R16 = 0b00100000
OUT PORTB, R16 ;Enciende el led
start:
LDI R16, 0b00100000 ;R16 = 0b00100000
OUT PORTB, R16 ; enciende el led
call
delay_500ms
LDI R16, 0b00000000 ;R16 = 0b0000000
OUT PORTB, R16 ; enciende el led
call
delay_500ms
jmp
start
Instrucciones empleadas
;K Valor
LDI Rd, K ;Carga
el registro Rd con el valor K
IN Rd, PINn ;Cargael valor de un registro como PINn a Rd
OUT PORTn, Rd ;Carga Rd a PORTn. Es empleada para mandar algún valor a un
puerto
JMP k ;Salta a la dirección k. En este caso la etiqueta start
Cambiar de estado una salida PD0 mediante cada que se pone en alto la entrada PB0
.include "m328pdef.inc"
.include "delay.inc"
.device atmega328p
;---------Configuración de puertos ---------------
.ORG 0x00 ;Comienzo
del código en la posición 0
; Inicializa el SP
LDI R16, HIGH(RAMEND) ; Carga el SPH
OUT SPH, R16
LDI R16,
LOW(RAMEND) ;Carga
el SPL
OUT SPL,
R16
LDI R16,
0x00 ;R16
= 0
OUT DDRB,R16 ;Pone como entrada el Puerto
B
NOP ;Espera un ciclo de reloj
LDI R16, 0xFF ;R16 = 0x0FF
OUT DDRD,R16 ;Pone como salida el Puerto B
NOP ;Espera un ciclo de reloj
LDI R16,0xFF ;Pone resistencia de pull up
OUT PORTB, R16 ;Pone en cero el puerto b
start:
sbis PINB,0 ;Salta la siguiente linea si PB0 es 1
jmp continuar1 ;salta a continuar1
call delay_100ms ;espera 100 milisegundos para
evitar rebotes
call delay_100ms ;espera 100 milisegundos para
evitar rebotes
call delay_100ms ;espera 100 milisegundos para
evitar rebotes
sbis PIND,0 ;Salta la siguiente linea si
PD0 es 1
jmp escero ;Salta a escero
ldi r17,0b00000000 ;r17=0
out PORTD,r17 ;PORTD = r17
jmp continuar1 ;Salta a continuar1
escero:
ldi r17,0b00000001 ;r17=1
out PORTD,r17 ;PORTD = r17
continuar1:
jmp start
Como crear una subrutina de retardo
Para este caso la subrutina está en otro archivo el cual nombraremos delay.inc- Damos click derecho en el nombre del proyecto
- Click en Add/new item...
- Seleccionamos include file y nombramos el archivo
- Una vez creada hay que añadir la librería con .include
.ORG 0x300 ;coloca la rutina de retardo en la dirección 0x300
dealy_10ms:
ldi r17,99 ; 1 ciclo
repetir1:
ldi r18,199 ;
1 ciclo
repetir:
nop
nop ; 1 ciclo
nop
nop ; 1 ciclo
nop
dec r18 ; 1 ciclo
brne
repetir ; 2 ciclos
dec r17 ; 1 ciclo
brne repetir1 ; 2 ciclos
ret ; 5 ciclo
Instrucciones empleadas
;K Valor
LDI Rd, K ;Carga el registro Rd con el valor K.
NOP ;No hace ninguna operación.
DEC Rd ;Carga Rd = Rd-1.
BRNE k ;Salta a la dirección k +1. En si el valor no es cero o z=0.
RET ;regresa a la dirección donde fue llamada + 1.
¿Cómo se calculó?
Bueno en primer lugar se utilizó una frecuencia de trabajo de 16 MHz por lo que
(1/(16x10^6))(1+1+100(200(8))+4))=0.01 seg = 10 ms
se repite primero 100 veces por 200 veces 8 ciclos que son los nop, dec y brne.
Si se utiliza otra frecuencia de trabajo para el micro se deberá hacer una subrutina parecida pero adecuada a la frecuencia de trabajo.
Con esto podemos realizar una nueva rutina de 100ms repitiendo 10 veces la subrutina de 10ms y de la misma manera podemos crear mas.
Ejemplo
Ejemplo
/*
* delay.inc
*
*
Created: 15/02/2017 12:17:22 p. m.
* Author:
NoeAdrian
*/
;----------------------Esta
es la subrutina de retardo dalay_500ms
-------------------------
.ORG 0x300 ;coloca
la rutina de retardo en la dirección 0x300
delay_500ms:
call
delay_100ms
call
delay_100ms
call
delay_100ms
call
delay_100ms
call
delay_100ms
ret
;----------------------Esta es la
subrutina de retardo delay_100ms
-------------------------
delay_100ms:
call
delay_10ms
call
delay_10ms
call
delay_10ms
call
delay_10ms
call
delay_10ms
call
delay_10ms
call
delay_10ms
call
delay_10ms
call
delay_10ms
call
delay_10ms
ret
;----------------------Esta es la
subrutina de retardo delay_10ms
-------------------------
delay_10ms:
ldi r17,99 ; 1 ciclo
repetir1:
ldi r18,199 ;
1 ciclo
repetir:
nop
nop
nop
nop
nop
dec r18 ; 1 ciclo
brne
repetir ; 2 ciclos
dec r17 ; 1 ciclo
brne repetir1 ; 2 ciclos
ret
Practica 1
Realizar el un programa que mediante un botón conectado al PUERTO B incremente el valor de la salida del PUERTO D en 1, mostrando el valor con un display 7SEG-BCD segmentos que vaya de 0 a F.
El código será simulado en Proteus.
Componentes
El código será simulado en Proteus.
Componentes
- 7SEG-BCD
- CAPACITOR 22pF
- ATMEGA328P
- BUTTON
- CRISTAL
- RES
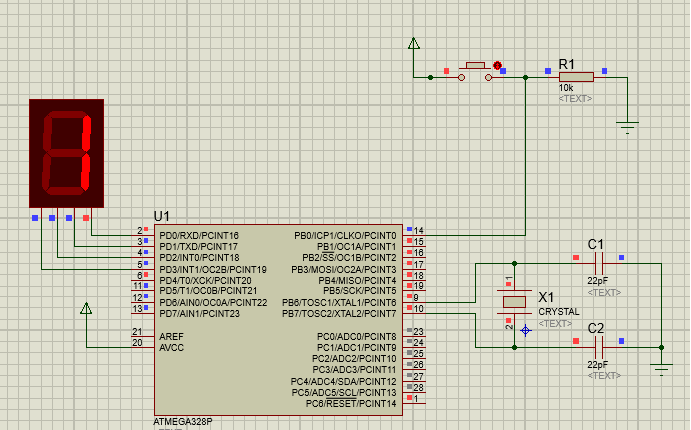
Configuración del microcontrolador (revisar su configuración, que corresponda con la imagen).

Al terminar el la practica se deberá entregar un reporte por cada persona, será hecho en computadora y contendrá:
- Portada
- Nombre de la institución
- Carrera
- Semestre
- Numero de la practica, unjidad y nombre de l a práctica
- Nombre del Alumno
- Nombre del profesor
- Lugar y fecha
- Introducción
- Objetivos
- Desarrollo
- Código del programa con comentarios.
- Fotografías de los resultados de la simulación
- Conclusión personal
ldi r17,16 ;Se debe poner este registro a 16 para compararlo con el valor del :puerto D
inc r18 ;r18 = r18+1
cp r18,r17 ;compara r18 con r17
breq mayora15 ;si es igual salta a mayora15